⾞線逸脱警告機能Lane Departure Warning(LDW)
クルマが⾞線を逸脱しかけた際、その危険性をハンドルの振動によってドライバーに伝える安全機能です。レスポンスの良いPairdriverのハンドル制御によって、再現性の⾼い警告振動を実現。⾛⾏状況に応じた振動の強弱により、ドライバーはより正確に状況を把握できます。




Pairdriverは、下記の3つの思想からなる制御コンセプトによって構成されています。これらのサイクルにより、ドライバーと自動運転システムが一つのチームのように機能する走行環境を実現します。




Pairdriverは、⾞線中央から車線境界までの操舵反力を連続的に制御しつつ、そのリスクの度合いに応じたハンドルの反⼒でドライバーに注意を促すことが可能。また警告⾳や警告灯ではなく、ハンドルの反⼒という直感的なコミュニケーションによって運転支援機能使用時のドライバーの信頼感を⾼めます。


NCAPやIIHSなど、自動車安全アセスメントのドライバー協調に関するレーティングにおいて、Paridriverは最高水準の評価獲得に貢献します。当社独自のソフトウェアソリューションにより、ドライバーはハンズオンとハンズオフの両方で高い安全性を維持しながらステアリングフィールをカスタマイズできます。


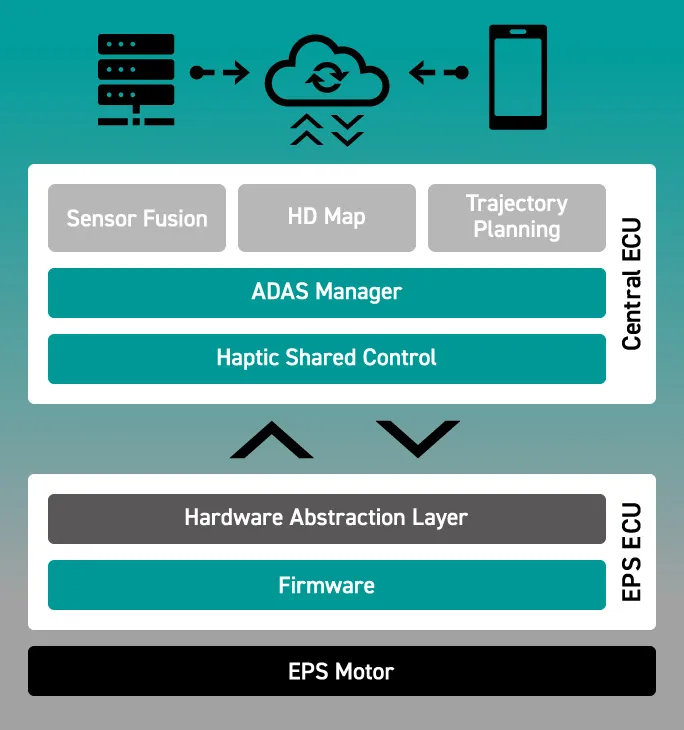
Pairdriverは、これまでのようなソフトウェアとハードウェアが一体となった仕組みとは異なり、ソフトウェアがハードウェアに依存しない仕組みを、独自の制御技術によって開発。これにより、カーメーカーやエンドユーザーが必要とする操舵特性をソフトウェアだけで構築し、フレキシブルかつ効率的に実装することが可能に。さらに、新機能を追加・更新する際はOTA(オーバー・ジ・エアー)で簡単に実装できるため、ステアリングアプリケーションのソフトウェアフレームワークとして長期的に利用できます。クルマの価値をソフトで高めるSDV(ソフトウェア・デファインド・ビークル)時代に最適なソフトウェアソリューションとなっています。

Pairdriverの制御コンセプトを実際の運転支援機能に活用することで、ドライバーは直感的で一貫性のある操舵反力が得られ、運転支援システムの意思を認知理解しやすくなります。さらに、オーバライドフリー(操舵中も運転支援が継続される仕組み)によって、信頼感や安心感の醸成、さらには、使いやすさの向上に貢献します。Pairdriverが対応できる運転支援システム(ADAS)の範囲はどんどん広がっています。ここでは、5つの主要な機能の動作を紹介します。
クルマが⾞線を逸脱しかけた際、その危険性をハンドルの振動によってドライバーに伝える安全機能です。レスポンスの良いPairdriverのハンドル制御によって、再現性の⾼い警告振動を実現。⾛⾏状況に応じた振動の強弱により、ドライバーはより正確に状況を把握できます。

⾞線の逸脱を防⽌するための安全機能です。システムが逸脱の兆候を察知すると、その危険性をハンドルの反⼒によってドライバーに継続的に伝えます。Pairdriverは、リスクの度合いに応じた反⼒を自由にカスタマイズすることが可能。⾼性能な舵⾓制御と協調操舵により、逸脱防止性能を維持しつつ、滑らかな操作介⼊を実現します。



⾛⾏中に⾞線の中央付近をキープする運転⽀援機能です。クルマの位置とドライバーのハンドル操作に応じたガイダンス⼒(⾃然で滑らかな制御介⼊)をドライバーに伝達します。⻑年培ったパワーアシスト制御の設計ノウハウを、運転⽀援時のハンドリングフィールにも活⽤しています。



ドライバーがウインカーを動かし、車線変更を始めたときにサポートする機能です。スムーズな誘導トルクをドライバーに伝達し、クルマを隣の車線へと誘導します。ドライバーは、操作中に変化する誘導トルクによって自動運転システムの意図を直感的に感じられます。





周囲の障害物との衝突を防ぎながら、車両を駐車スペースへと誘導します。パーキングアシストを使用中でも、機能を無効にすることなく手動で駐車位置の調整が可能です。障害物に接近すると、ステアリングの反力トルクによってドライバーに警告が伝えられ、車両の進路が修正されます。Pairdriverは、危険を明確に伝えるために反力トルクの強さをカスタマイズすることができます。